- Enjamlarda hakyky wagt gözegçiligi we derňew
- Baý I / O we ROS2 real wagt operasiýa ulgamy taýýar
- AI ekosistemasy üçin zerur maglumat aragatnaşyk hyzmatlary

Ammar logistika robotlarynyň amaly ýagdaýlary

Performanceokary öndürijilikli pes senagat gözegçisi

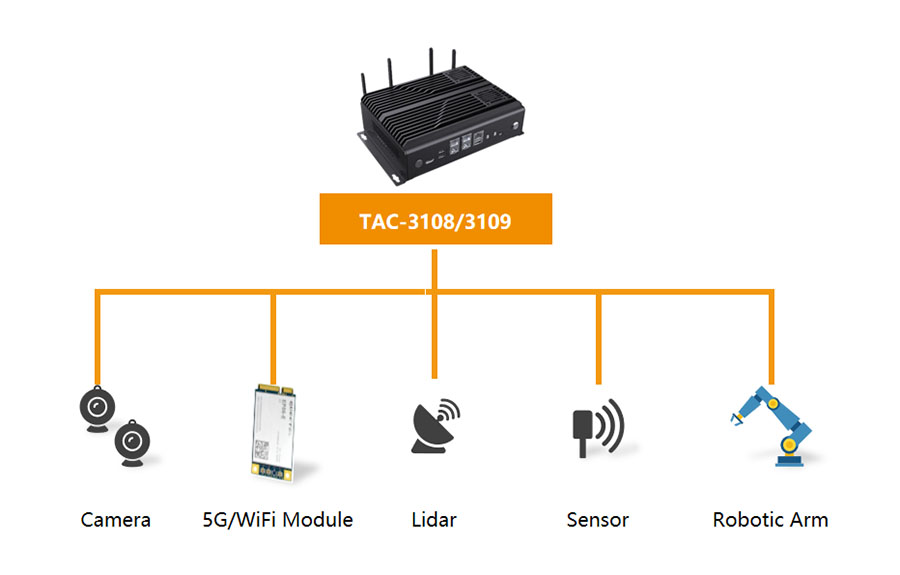
TAC-3108/3109
- Gurlan NVIDIA Jetson AGX Orin SoM


Simsiz modul
- WiFi 6 & BT 5.2
Giňeldilip bilinýän AI öndürijiligi, 275TOP çenli
- Iň täze NVIDIA Jetson AGX Orin SoM tehnologiýasyny kabul etmek
- Öndürijiligi öňki nesil AGX Xavier-den 8 esse ýokary
- NVIDIA Ampere GPU, 2048 NVIDIA CUDA ýadrosy, 64 Densor ýadrosy
Enjam birikmeleri üçin köp funksiýaly I / O we giňeltmek ýerleri
- 3xUSB3.0, 5xGbE, COM, CANBus, DI / O.
- WiFi goldaýar we M.2 arkaly 5G ultra ýokary tizlikli maglumat geçirişini goldaýar
Çalt AI ýerleşdiriş ulgamy
- JetPack 5.02 SDK-ny goşmak bilen öňünden gurlan Ubuntu 20.04 ulgamy
- Robot programmalary üçin ROS2 we Edge AI toplumlary
Ammar logistika robotlarynyň amaly ýagdaýlary
Programma kynçylyklary
- Compokary hasaplaýyş öndürijiligi we köp adamly talaplar
- Hakyky maglumatlary gözegçilik we derňew üçin ýokary tizlikli maglumat geçirişi
- Dinamiki gurşawy ulanmak zerurdyr
Çözgüt
- 275TOPS çenli AI öndürijiligini üpjün ediň
- Birnäçe enjamy birikdirmek üçin uniwersal I / O interfeýsini üpjün ediň
- Agyr senagat standartlaryna laýyklykda giň iş temperaturasy (-20 ~ 60 ℃)
Meýilnamanyň artykmaçlyklary
- Ubuntu 20.04, ROS2 toplumy we NVIDIA JetPack SDK bilen öňünden gurlan çalt AI enjamlaşdyrylyşy
- Agyr şertlerde durnukly işlemek üçin çydamly senagat dizaýny
- Resolutionokary çözgütli kamera birikmesi, senagat protokol aragatnaşygy we simsiz birikmek üçin baý I / O goldawy